Scrivo questo articolo perché penso a tutte le volte che ho pensato a sezioni complesse e alle loro proprietà geometriche: infatti per le figure semplici (cerchio, rettangolo…) la cosa è abbastanza facile (basta consultare un qualunque prontuario), mentre per le figure complesse o si scompone la figura in parti semplici di cui sappiamo la soluzione ed effettuiamo la somma delle proprietà geometriche (somma pesata, teorema di Huygens-Steiner…), oppure ci affidiamo ad un programma per computer.
Il problema è che di programmi per computer che effettuano il calcolo delle proprietà geometriche in genere li ho sempre trovati o a pagamento oppure sviluppati in open-source dentro fogli excel, ma che trovo poco pratici per una generalizzazione totale (es: curve, fori…). Tuttavia, esiste un’altra possibilità: Autocad!
Autocad infatti è in grado di calcolare tutte le proprietà inerziali di una REGION tramite il comando massprop (oppure Tools -> Inquiry -> Region/Mass Properties): basterà infatti selezionare la regione che ci interessa per conoscere tutte le varie proprietà inerziali e di massa.
Sono però necessari alcuni accorgimenti:
- il baricentro è riferito all’origine degli assi dell’UCS
- i momenti d’inerzia X ed Y sono riferiti agli assi dell’UCS
Risulta quindi opportuno disegnare la figura convenientemente con gli assi del .dwg, nelle dimensioni che ci interessano per l’output (nella versione 2018 vengono dati anche il baricentro e i momenti d’inerzia rispetto agli assi principali della Region).
COME SI CREA UNA REGION:
Creare una REGION è facile: basta selezionare una polilinea chiusa e fare Draw -> Region (oppure scrivendo direttamente region) e selezionarla.
Ovviamente, è possibile creare delle REGION composte, soprattutto nel caso di fori: affinché si possa ottenere le caratteristiche geometriche in maniera diretta infatti si può utilizzare i comandi per il solid editing, quali UNION, SUBTRACT ed INTERSECT: essi funzionano con le regioni in maniera totalmente analoga ai solidi.
ARMATURA:
Una volta che conosciamo le proprietà della sezione, se essa è omogenea non dobbiamo fare altro, ma ad esempio se è in C.A., dobbiamo armarla: tuttavia trovo sia molto più conveniente non ragionare in termini di armatura su Autocad, ma fare il conto separatamente a mano come masse puntiformi e sommare opportunamente i risultati con quelli della sezione “piena”.
Tale soluzione descritta qua sopra non è ovviamente implementabile in alcun codice di calcolo, ma serve soprattutto a ricavare velocemente i parametri per un calcolo manuale ad esempio di una trave con sezione complessa o composta.
 è (una delle possibili scritture):
è (una delle possibili scritture):
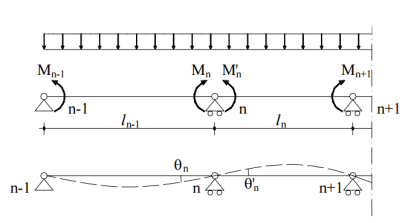
 appoggi con lettere progressive, mentre i vari tratti della trave continua con numeri progressivi. Questo per mettere in risalto la numerazione differente degli appoggi da quella dei carichi e delle lunghezze; chiaramente, per fare qualche esempio,
appoggi con lettere progressive, mentre i vari tratti della trave continua con numeri progressivi. Questo per mettere in risalto la numerazione differente degli appoggi da quella dei carichi e delle lunghezze; chiaramente, per fare qualche esempio,  . È importante affinché quanto di seguito abbia significato generale che la numerazione non cambi, in quanto alla fine quando propongo la formulazione generale in
. È importante affinché quanto di seguito abbia significato generale che la numerazione non cambi, in quanto alla fine quando propongo la formulazione generale in  si deve aver capito tale sistema.
si deve aver capito tale sistema.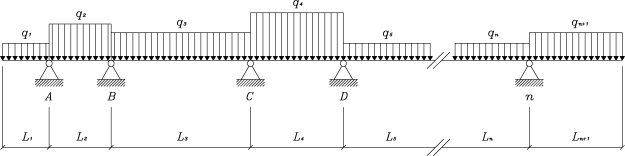
 , ottenendo così un risultato corretto e contemporaneamente non far “scorrere” la numerazione impostata):
, ottenendo così un risultato corretto e contemporaneamente non far “scorrere” la numerazione impostata):